岛屿的最大面积
题目
给定一个包含了一些 0 和 1的非空二维数组
grid, 一个 岛屿 是由四个方向 (水平或垂直) 的 1 (代表土地) 构成的组合。你可以假设二维矩阵的四个边缘都被水包围着。找到给定的二维数组中最大的岛屿面积。 (如果没有岛屿,则返回面积为0。)
示例1:
[[0,0,1,0,0,0,0,1,0,0,0,0,0], [0,0,0,0,0,0,0,1,1,1,0,0,0], [0,1,1,0,1,0,0,0,0,0,0,0,0], [0,1,0,0,1,1,0,0,1,0,1,0,0], [0,1,0,0,1,1,0,0,1,1,1,0,0], [0,0,0,0,0,0,0,0,0,0,1,0,0], [0,0,0,0,0,0,0,1,1,1,0,0,0], [0,0,0,0,0,0,0,1,1,0,0,0,0]]对于上面这个给定矩阵应返回
6。注意答案不应该是11,因为岛屿只能包含水平或垂直的四个方向的‘1’。示例2:
[[0,0,0,0,0,0,0,0]]对于上面这个给定的矩阵, 返回
0。注意: 给定的矩阵
grid的长度和宽度都不超过50。
深度优先搜寻法
地图中的岛屿可以视为图,求最大的岛屿即为求最大的连通分量。依次以图中每个点为起点遍历图,即可获取所有连通分量。
深度优先搜寻
深度优先搜寻演算法(英语:Depth-First-Search,DFS)是一种用于遍历或搜寻树或图的演算法。沿着树的深度遍历树的节点,尽可能深的搜寻树的分支。当节点v的所在边都己被探寻过,搜寻将回溯到发现节点v的那条边的起始节点。这一过程一直进行到已发现从源节点可达的所有节点为止。如果还存在未被发现的节点,则选择其中一个作为源节点并重复以上过程,整个行程反覆进行直到所有节点都被存取为止。属于盲目搜寻。
实现方法
- 首先将根节点放入伫列中。
- 从伫列中取出第一个节点,并检验它是否为目标。
- 如果找到目标,则结束搜寻并回传结果。
- 否则将它某一个尚未检验过的直接子节点加入伫列中。
- 重复步骤2。
- 如果不存在未检测过的直接子节点。
- 将上一级节点加入伫列中。
- 重复步骤2。
- 重复步骤4。
- 若伫列为空,表示整张图都检查过了——亦即图中没有欲搜寻的目标。结束搜寻并回传「找不到目标」。
举个例子,给定如下以二维整数数组表示的图:
[[0,0,1,0,0,0,0,1,0,0,0,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
依次以每个点为起点,深度优先搜寻。假设现在(1, 7)为起点进行深度优先搜寻。
[[0,0,1,0,0,0,0,1,0,0,0,0,0],
[0,0,0,0,0,0,0,A,1,1,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
获取(1, 7)相邻的点[(0,7),(1,8)]:
[[0,0,1,0,0,0,0,B,0,0,0,0,0],
[0,0,0,0,0,0,0,A,1,1,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
然后,依次以(0,7)为起点,获取未访问的相邻点。(0,7)仅有一个相邻点(0,7)但已被访问。
再然后,以(1,8)为起点,获取未访问的相邻点。(1,8)有两个相邻点,且其中(1,9)未被访问。
[[0,0,1,0,0,0,0,B,0,0,0,0,0],
[0,0,0,0,0,0,0,A,C,D,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
再然后,以(1,9)为起点,获取未访问的相邻点。(1,9)仅有一个相邻点但已被访问。至此,完成图中一个连通分量的深度优先搜寻。依次以图中每个点为起点,重复上述深度优先搜寻就可以遍历图中所有连通分量。
最后,从所有连通分量中取节点数最多的即为最大岛屿。
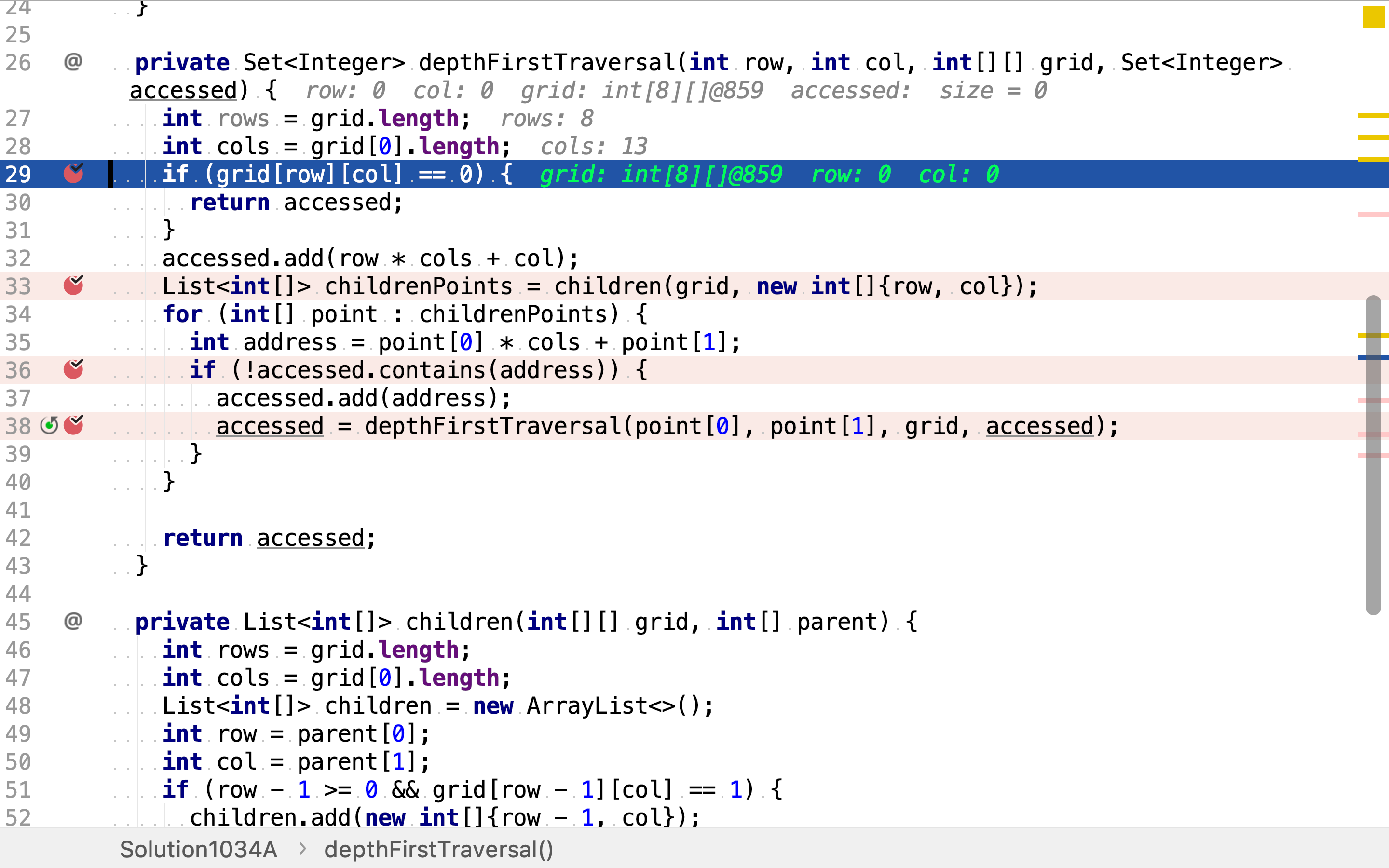
代码
依次以每个点为起点,深度优先搜寻。
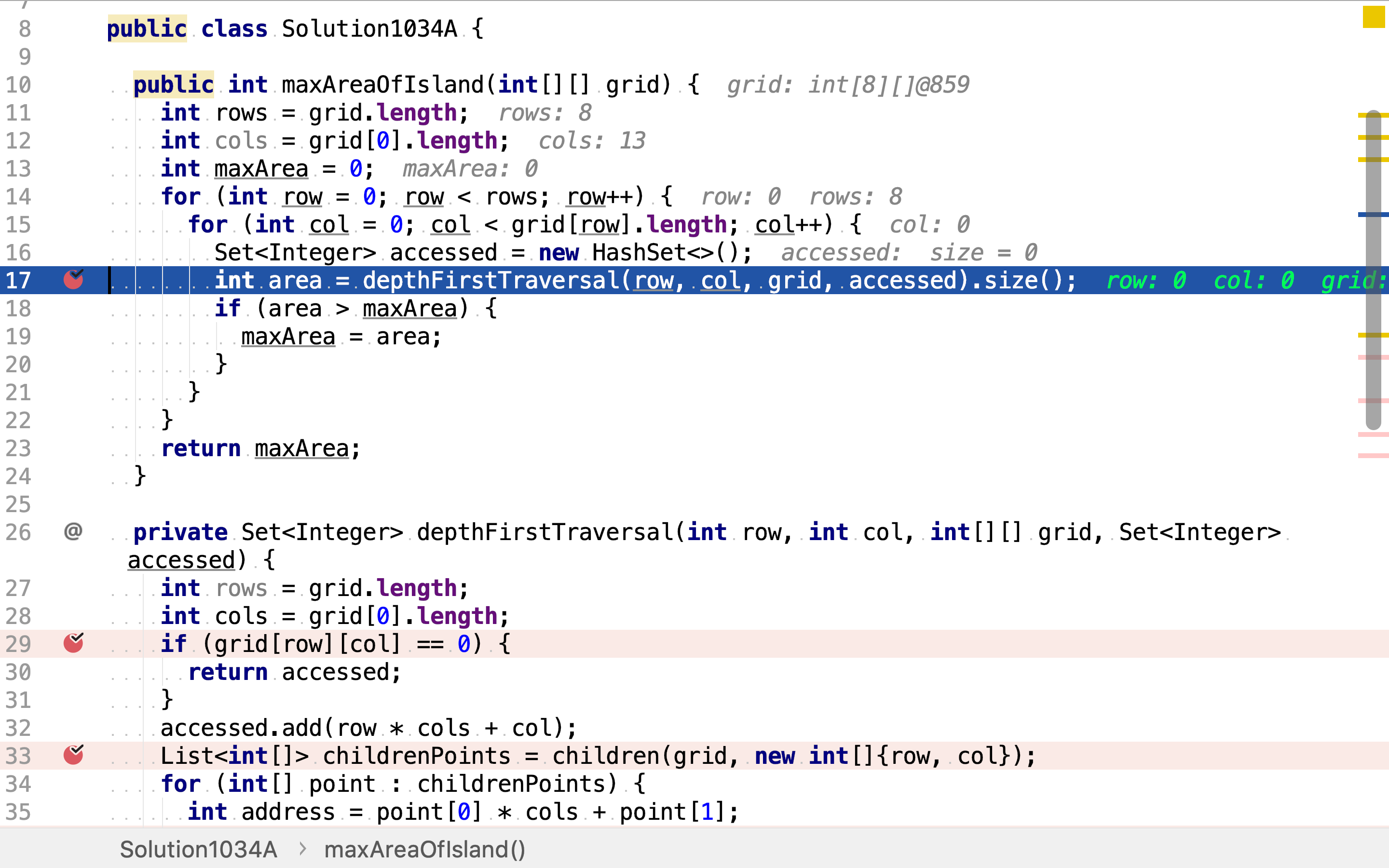
深度优先搜寻是一个递归方法。其先获取相邻的点,
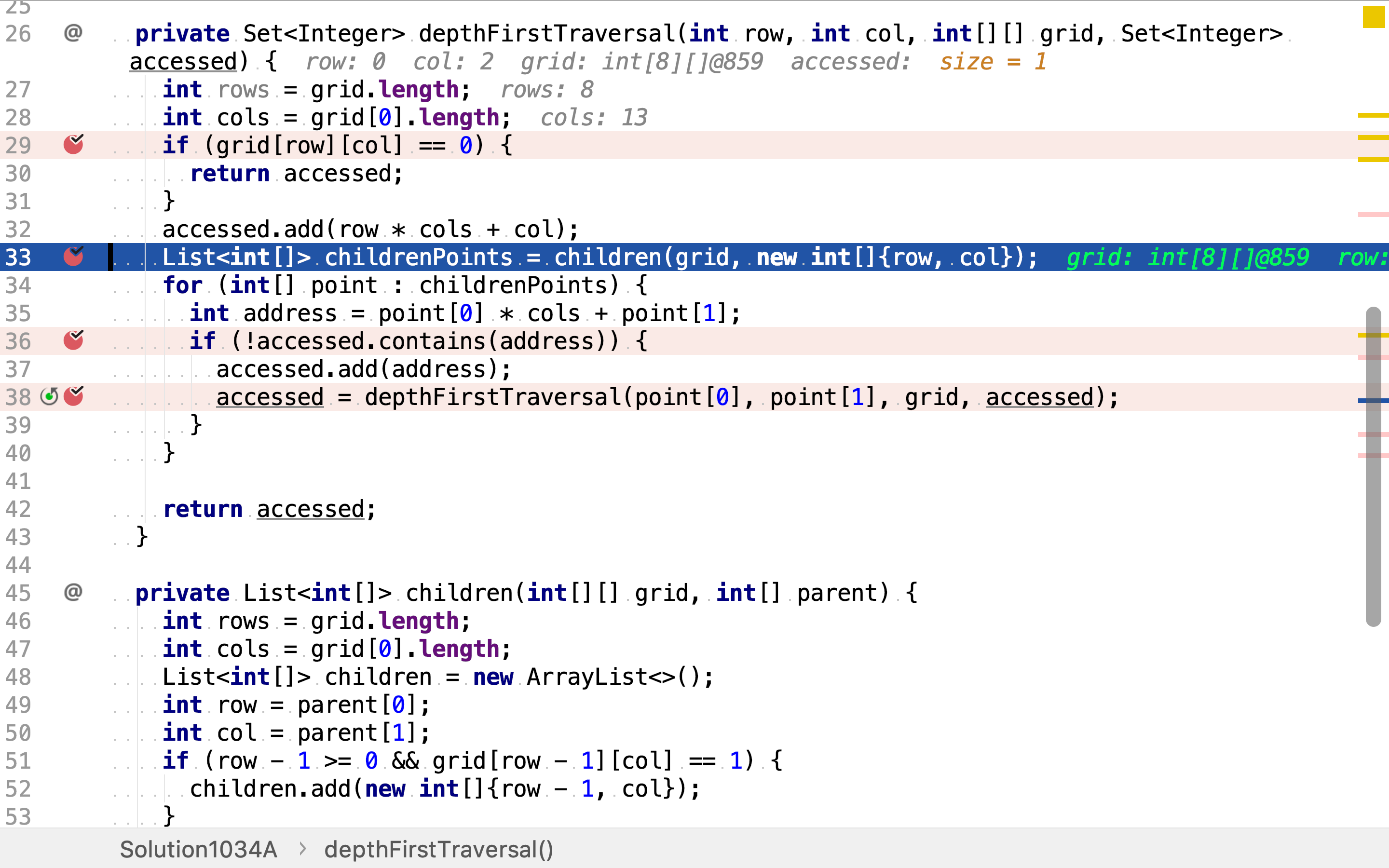
然后,排除掉已访问过的点。
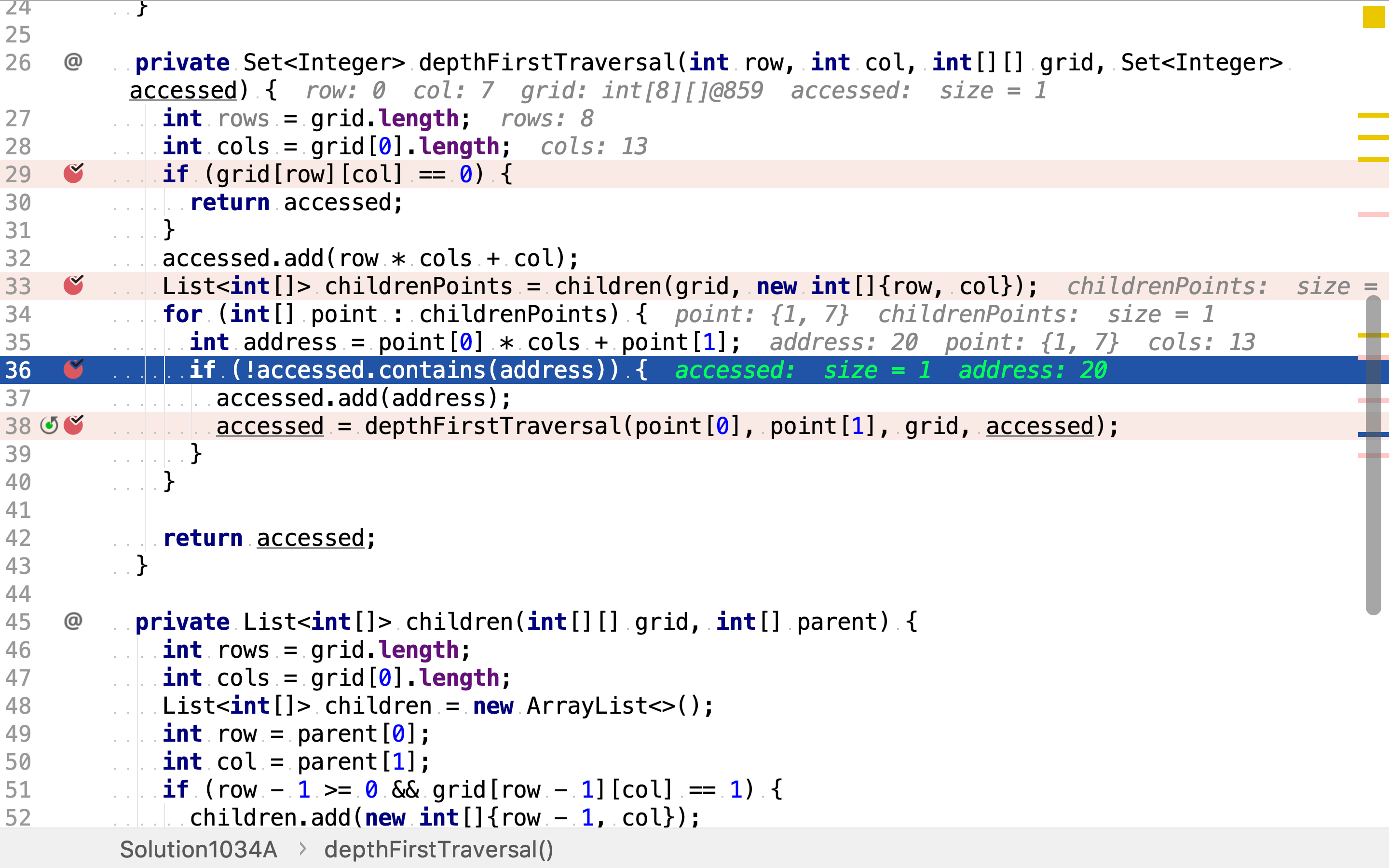
再然后,以相邻点为起点,递归调用深度优先搜寻。
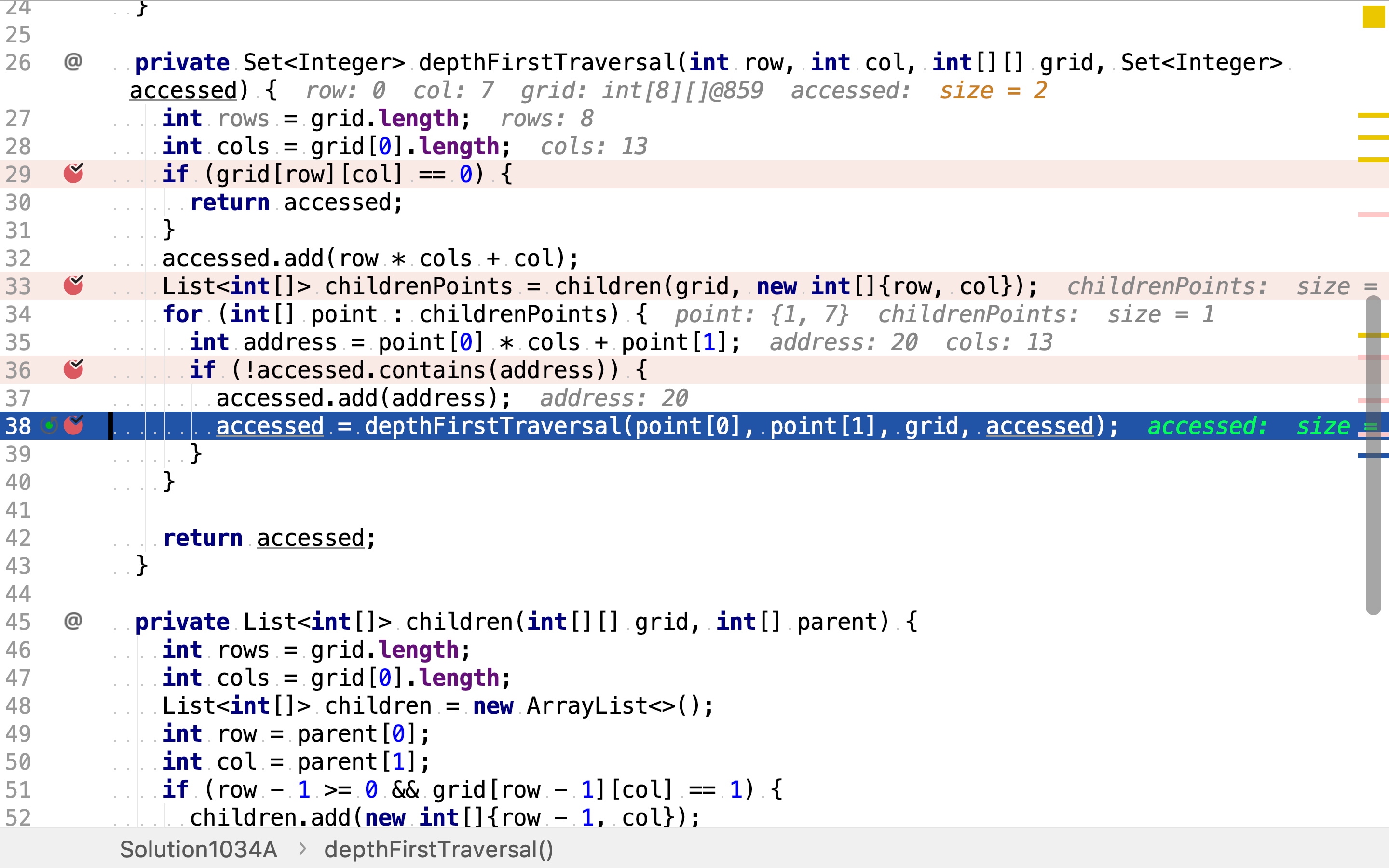
递归终止条件为无未访问的相邻点,或起点为空。
复杂度分析
时间复杂度
本演算法依次以每个点为起点深度优先搜寻。设二维数组点总数为,则其执行了次深度优先搜寻。每次深度优先搜寻最多访问了个点。所以,时间复杂度为。
空间复杂度
深度优先搜寻时保存了所有已访问过的点,其最多为。空间复杂度为。
一次遍历
在上述中演算法中,同一个连通分量会被搜寻多次。如果,在某个点被首次搜寻后将其移除,则不会有任何连通分被重复搜寻。任意点也不会被重复搜寻。
举个例子,给定如下以二维数组表示的图:
[[0,0,1,0,0,0,0,1,0,0,0,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
按照上述演算法,连通分量[(0,7),(1,7),(1,8),(1,9)]会被搜寻四次。若在首次访问点时,即将其清除,则该分量仅会被搜寻一次。
以(0,7)为起点时,该连通分量第一次被搜寻到。
[[0,0,1,0,0,0,0,A,0,0,0,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
获取其相邻点,同时将自身清除(置为-1)。
[[0,0,1,0,0,0,0,,0,0,0,0,0],
[0,0,0,0,0,0,0,B,1,1,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
继续以相邻点为起点,继续深度优先搜寻。
[[0,0,1,0,0,0,0,-1,0,0,0,0,0],
[0,0,0,0,0,0,0,-1,-1,-1,0,0,0],
[0,1,1,0,1,0,0,0,0,0,0,0,0],
[0,1,0,0,1,1,0,0,1,0,1,0,0],
[0,1,0,0,1,1,0,0,1,1,1,0,0],
[0,0,0,0,0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,0,0,1,1,1,0,0,0],
[0,0,0,0,0,0,0,1,1,0,0,0,0]]
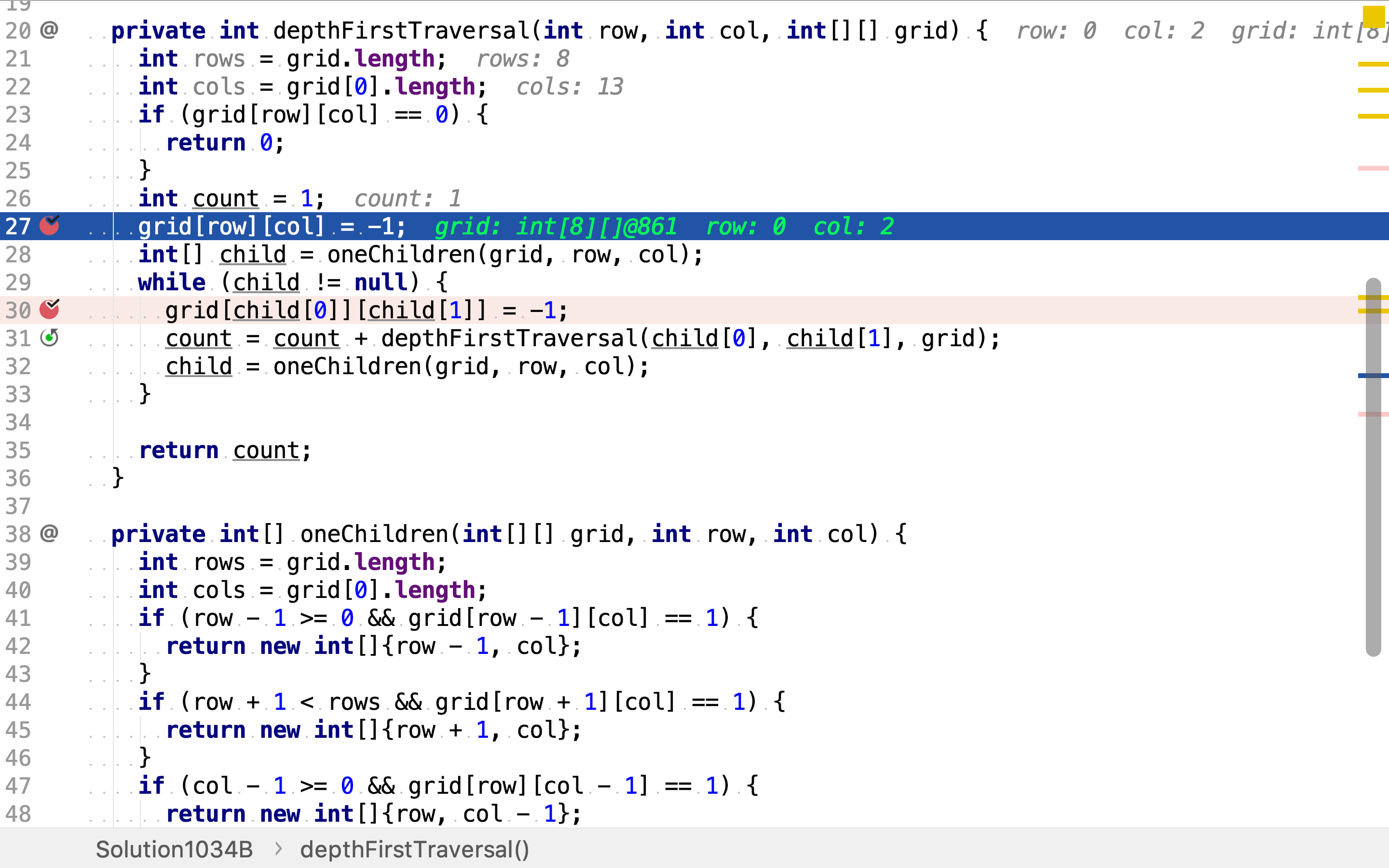
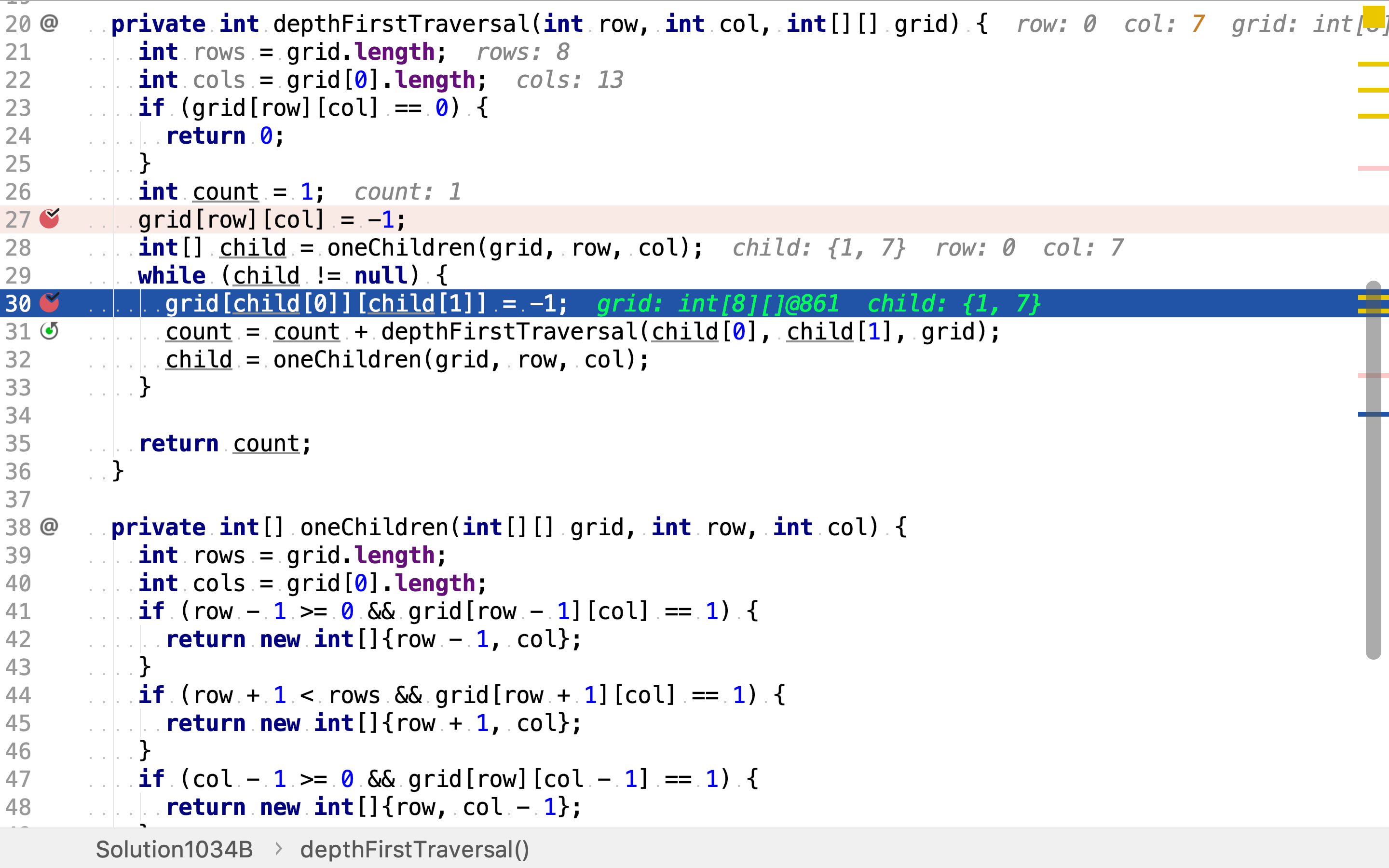
代码
依次以每个点为起点,深度优先搜寻。
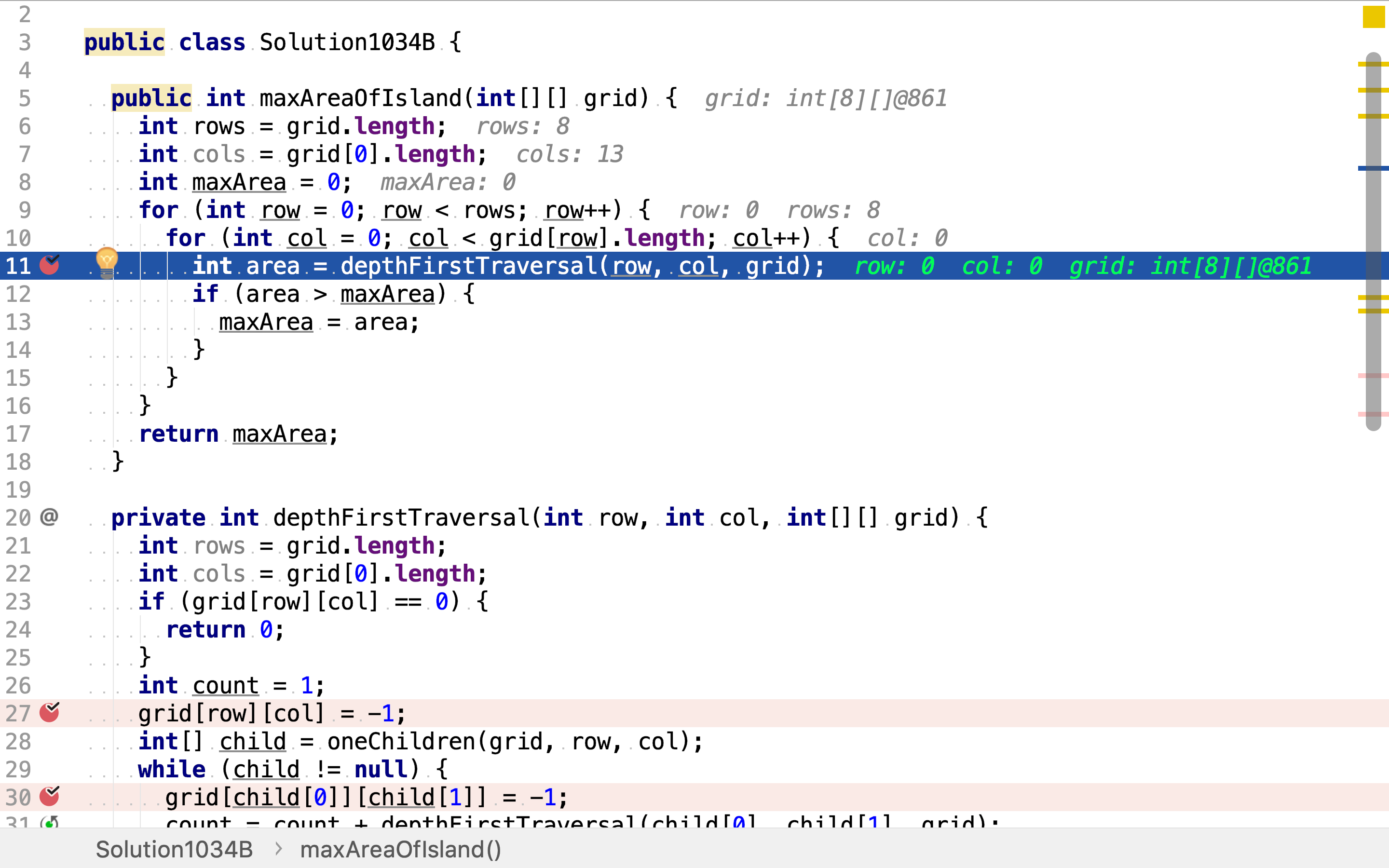
首次访问时点时,将其置为-1(已访问),以区分空点0。
复杂度分析
时间复杂度
每个点至多被访问五次,第一次从1转为-1,第二至第五次被以上下左右点的相邻点被检测。时间复杂度为。
空间复杂度
每个点的已访问状态是重用输入值空间的,另外使用了常数量的变量。空间复杂度为。